 总结了抗倾覆技术要点,最终形成了整个收放系统的设计方案。可为同类装置的研发提供一定的参考价值,更可推进我国水下探测装置收放系统设计标准的革新。
总结了抗倾覆技术要点,最终形成了整个收放系统的设计方案。可为同类装置的研发提供一定的参考价值,更可推进我国水下探测装置收放系统设计标准的革新。
关键词:水下探测装置;收放系统;机械结构;A架;液压缸
中图分类号: S973.1+3 文献标识码: A 文章编号: 2095-8412 (2017) 02-068-03
工业技术创新 URL: http: // DOI: 10.14103/j.issn.2095-8412.2017.02.019
引言
注重水下探测装置收放系统机械结构的合理设计,可为提升系统运行效率,提高装置整体安全与服务水平,完善现代化水下探测装置的服务功能提供保障[1-5]。本文结合收放系统在水下探测装置中的实际作用及特点,选择可靠的设计方案和方法,以系统合理性的评估为基础,进行局部技术改进,最大限度地满足水下探测装置的实际需求。
1 总体设计
某水下探测装置收放系统如图1所示。纵观全局可知,在总体设计中需要充分考慮A架、液压缸、绞车、排缆等部件的特性,尤其应注重抗倾覆设计,以便为系统机械结构组装过、收放运行提供可靠支撑和数据参考。
总体设计方案与技术改进的主要参数如表1所示。
2 局部设计与技术改进
2.1 A架
在A架设计中,需要明确支撑与基架稳固、排缆力矩合理、销轴定位科学等具体设计要点,具体包括以下七大方面:
(1)基架性能。在基架设计材料选择中,优选塑性性能、焊接性能、力学性能良好的Q345B方型钢管,减少收放系统运行中不确定载荷的影响;
(2)基架尺寸。结合收放系统运输便利性要求,注重基架整体尺寸的有效确定,确保其中的保护装置吊环、集装箱等可以高效运输;
(3)插槽优化。结合系统功能特性,确定最佳插槽。结合标准叉车的工作范围要求,合理设置插槽孔,确保叉车稳定运行;
(4)焊接设计。选择可靠的焊接方法与焊头,注重二氧化碳气体保护焊的合理使用,优化收放系统的服务功能;
(5)销轴定位。选择可靠的销轴材料,确定其最佳定位方式,促使收放系统长期处于稳定、高效的运行状态;
(6)轴承选型。A架摆动过程中,各构件之间将会产生滑动摩擦力,加剧了A架磨损,因此需要注重滑动轴承选型;
(7)滑轮设计。为了优化A架的工作性能,保持收放系统运行高效,也需注重滑轮部分的合理设计。
A架整体设计结构图如图2所示。
2.2 液压缸
在液压缸设计中,需要从参数设计和软件设计两方面入手:
(1)参数设计。计算缸筒的内径、壁厚,优化缸筒设计;确定最佳的活塞杆直径,计算其最大抗压强度,增强活塞杆参数设置合理性;校核危险界面,优化液压缸组成结构。
(2)软件设计。通过计算机软件的合理使用,进一步确定液压缸结构尺寸,促使其达到收放系统机械结构设计的实际要求。通过软件设计得出的液压缸结构尺寸设计图如图3所示。
2.3 绞车
作为收放系统的重要组成部分,绞车的合理设计关乎整个结构的工作稳定性。应从两方面入手:
(1)卷筒的科学设计。选择Q345作为卷筒材料,满足大尺寸卷筒制作的实际需求。结合绞车结构特点,确定最佳的卷筒直径、厚度及长度,降低收放系统正常工作时各类故障的发生率;
(2)卷筒轴的合理设计。卷筒轴设计需充分考虑卷筒的功能特性,合理设置固定心轴与转轴,对其中的转轴弯矩、转轴扭矩、心轴弯矩等联合起来,科学计算,完善设计方案。
图4所示为绞车结构设计图。
2.4 排缆
排缆设计有利于优化排缆器的工作性能,保持出缆顺畅性,确保脐带缆能够紧密排放在卷筒上,为工作效率的提高提供可靠保障。需要明确以下设计要点:
(1)加强往复丝杆设计。结合丝杆工作性能要求,建议选择性能可靠的45钢,满足丝杆长期使用的抗压强度,增强耐磨性。此外,确定丝杆各参数,通过受力分析,确定其轴向载荷大小,结合排缆器长期使用状态下的情况确定往复丝杆轴向力,并结合丝杆螺纹形式确定往复丝杆中径。
(2)注重排缆器选型设计,其中包括轴承座设计与光导轨选型设计。因为丝杆是往复杆,并且有着较大的轴向力,因此运用双端固定拉伸的轴承座设计实现往复丝杆的支撑工作最为适合。在光导轨选型方面,需要考虑排缆器自身重力及摩擦力等的作用,并尽可能将两端的内螺纹型导向轴作为光导轨轴。
(3)结合系统主要技术参数,确定最佳的排缆器结构尺寸。例如,门架系统和绞车系统的主要技术参数如表1所示,那么在排缆设计中,应根据这些参数保留一定的余量,以免挤压其它部件,影响收放系统正常运行。
3 抗倾覆要点分析
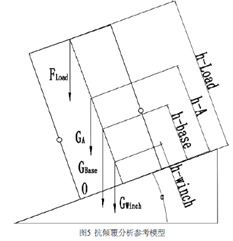
水下探测装置收放系统在工作过程中,载荷较大、尺寸较高,因此抗倾覆分析也是重要环节之一。结合行业技术规范的实际要求,建立参考模型,如图5所示。分析得知,影响稳定性的主要因素有:脐带缆拉力、母船倾斜角度、强风载荷、收放系统自身重力等。为了有效抗倾覆,需做到:
(1)结合系统实际概况,注重纵向受力分析,了解各结构受力情况;
(2)注重信息技术与计算机网络的使用,增强模型可信度,为相关影响因素的有效处理提供可靠依据;
(3)注重参考模型构建合理性,实现对不同应力下系统机械结构稳定性的有效分析,促使其中的安全隐患控制在萌芽状态。
4 结束语
通过对水下探测装置收放系统的设计进行深入探究,可知系统结构的合理设计关乎整个装置的工作高效性及性能可靠性。展望未来,水下探测装置收放系统的构建,应更加注重机械结构的细致设计,以及继续加大信息技术的使用,促使我国水下探测装置研制水平获得质的飞跃。
参考文献
张波. 自治式水下机器人水下对接装置研究[D]. 哈尔滨: 哈尔滨工程大学, 2013.
刘洋. 可回收式卡爪连接器系统设计及相关技术研究[D]. 哈尔滨: 哈尔滨工程大学, 2013.
袁威. 特种收放装置关键技术及虚拟仿真[D]. 镇江: 江苏科技大学, 2014.
窦京. 带缆遥控水下机器人总体设计及流体动力特性研究[D]. 镇江: 江苏科技大学, 2014.
彭曼. A支架系统结构设计研究[D]. 哈尔滨: 哈尔滨工程大学, 2012.